by Scotty Fletcher | 26 June 2013

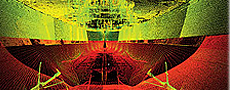
Geospatial professionals collect point-cloud data at a race track with the SmartGeoMetrics ProScan G-Series mounted on a golf cart.
A client who develops auto racing video games needs thousands of images of multiple real world racetracks all over the world – including the track itself, grandstands and the pit areas – and software that can model these images in 3D.
The answer is point cloud data, of course, but, how to collect it?
Renting the tracks to gain exclusive access for car-based sensors or renting aircraft for multiple passes with airborne scanners is too expensive and takes too long. And since these tracks are all over the world, it is difficult to transport the equipment quickly and cost-effectively.
What if there was a way to make a terrestrial-based 3D laser scanner mobile? That’s what developers at SmartGeoMetrics and Germany-based p3dsystems were thinking when the companies created the ProScan G-Series.
“You simply attach the unit to a steady cam vest or dolly and collect data as fast as you can walk,” said Sam Billingsley, vice president of business and product development at SmartGeoMetrics, a division of SmartMultiMedia Inc., a North American reseller of the ProScan G101. “To completely scan an entire racetrack takes hours instead of days.”

The SmartGeoMetrics ProScan G-Series is demonstrated mounted on a rolling cart.
As Billingsley is quick to point out, the system is an accessory to be used with your current technology. It is highly adaptable because it can be utilized on a mobile platform, such as a dolly, a steady cam rig or even a backpack. And, it isn’t just for racetracks.
“We have scanned shorelines, climbed in the front of boats and even sat on the back of golf carts while we drove around a track,” said Billingsley. “And if you really need high accuracy, you can always take it off and put it on a tripod or you can just walk slower.”
The modular system, which breaks down into Pelican cases and can easily be transported as luggage on any commercial flight, allows users to combine the speed of a mobile scanner with the portability of a static scanner. Perhaps best of all, it is compatible with most phase-based scanners. You simply bolt your scanner on top of the dolly, and voilá, you have a mobile scanner. You don’t need a separate scan head because it adapts to what you already own.
“This is one of the first accessories on the market that literally extends the lifespan of your existing equipment,” said Billingsley. “In scanning technology, equipment typically becomes outdated after just two or three years. Now you can create a brand new mobile scanner utilizing what you already have.”
There is only one ProScan G-Series system available in North America with two more under contract. It comes with a tablet, as well as the PCloud software required to run it on your scanner and for post-processing.
The ProScan fills a hole in the market when a job is bigger than what can be effectively accomplished with a tripod, but too small for aerial LiDAR or fixed mobile scanning.
“If we need to cover hundreds of square miles, we’ll fly it, but there are lots of upfront costs with that. And if you use helicopters and aircraft, you will capture more data, but with lower accuracy and resolution,” said Billingsley. “This system opens up a tremendous amount of opportunities as far as GIS mapping goes. If you already have a scanner that is supported by this equipment, you simply bolt your scanner to it and you’re off and running.”